Sonntag, 25. Januar 2015
17_Python_Hexapode_Bewegungen
http://rasppiprojekte.blogger.de/stories/2442344/
- Gerade gehen:
1. 1400-1000-1100
2. 1750-1000-1100
3. 1750-1700-1800
4. 1400-1700-1800
Duration: 500ms
Geschwindigkeit: Max
in der Schleife
- Code:
16 (py, 1 KB)
- Gerade gehen:
1. 1400-1000-1100
2. 1750-1000-1100
3. 1750-1700-1800
4. 1400-1700-1800
Duration: 500ms
Geschwindigkeit: Max
in der Schleife
- Code:
16 (py, 1 KB)
thomasschwerin am 25. Januar 15
|
Permalink
|
0 Kommentare
|
kommentieren
Samstag, 24. Januar 2015
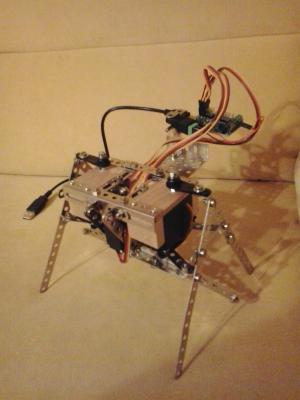
16_Hexapode_mit_3_Servos (erledigt)
http://rasppiprojekte.blogger.de/stories/2442344/
1. Version

Nur zwei Servo's; Stabilität zu gering; Bewegungsablauf gut
2. Version
Drei Servo's; Stabilität sehr gut; Bewegungsablauf schlecht; Beine zu nahe am Korpus
3. Version

drei Servo's; Stabilität sehr gut; Bewegungsablauf sehr gut
Das nächste Mal mit Lageschalen oder Lagergehäuse verbauen.
1. Version
Nur zwei Servo's; Stabilität zu gering; Bewegungsablauf gut
2. Version
Drei Servo's; Stabilität sehr gut; Bewegungsablauf schlecht; Beine zu nahe am Korpus
3. Version
drei Servo's; Stabilität sehr gut; Bewegungsablauf sehr gut
Das nächste Mal mit Lageschalen oder Lagergehäuse verbauen.
thomasschwerin am 24. Januar 15
|
Permalink
|
0 Kommentare
|
kommentieren
Donnerstag, 18. Dezember 2014
15_Maestro_Servo_Controller (erledigt)
http://rasppiprojekte.blogger.de/stories/2442344/
Die Servo-Steuerung mit dem RaspberryPi hat sich als ungenügend herausgestellt. Die Software-Steuerung ist zu ungenau und zu langsam. Deshalb habe ich mich für diesen Servo-Controller entschieden:
Dokumentation:
http://www.pololu.com/docs/0J40
Ausführung auf dem Notebook mit Windows XP (offline) - Programm funktioniert tadellos. Servos lassen sich ohne Probleme ansteueren
- Stromversorgung:
http://forum.pololu.com/viewtopic.php?f=16&t=9417
(in Zukunft mal ausprobieren)
Installationsanleitung und Beispiel für Linux:
https://github.com/FRC4564/Maestro
Systemaktualisierung durchgeführt
sudo apt-get update
sudo apt-get upgrade
Installationsvoraussetzung:
wget http://sourceforge.net/projects/pyserial/files/pyserial/2.7/pyserial-2.7.tar.gz
tar –zxf pyserial-2.7.tar.gz
cd pyserial-2.7
sudo python setup.py install
Programmbibliothek hier:
https://github.com/FRC4564/Maestro/blob/master/maestro.py
funktionstüchtige Beispiel gibt es hier:
http://martinsant.net/?page_id=402
http://strichpunkt.it/raspberry-pi-pololu-servo-steuerung/
Die Servo-Steuerung mit dem RaspberryPi hat sich als ungenügend herausgestellt. Die Software-Steuerung ist zu ungenau und zu langsam. Deshalb habe ich mich für diesen Servo-Controller entschieden:
Dokumentation:
http://www.pololu.com/docs/0J40
Ausführung auf dem Notebook mit Windows XP (offline) - Programm funktioniert tadellos. Servos lassen sich ohne Probleme ansteueren
- Stromversorgung:
http://forum.pololu.com/viewtopic.php?f=16&t=9417
(in Zukunft mal ausprobieren)
Installationsanleitung und Beispiel für Linux:
https://github.com/FRC4564/Maestro
Systemaktualisierung durchgeführt
sudo apt-get update
sudo apt-get upgrade
Installationsvoraussetzung:
wget http://sourceforge.net/projects/pyserial/files/pyserial/2.7/pyserial-2.7.tar.gz
tar –zxf pyserial-2.7.tar.gz
cd pyserial-2.7
sudo python setup.py install
Programmbibliothek hier:
https://github.com/FRC4564/Maestro/blob/master/maestro.py
funktionstüchtige Beispiel gibt es hier:
http://martinsant.net/?page_id=402
http://strichpunkt.it/raspberry-pi-pololu-servo-steuerung/
thomasschwerin am 18. Dezember 14
|
Permalink
|
0 Kommentare
|
kommentieren
Suche
Neu
- 17_Python_Hexapode_Bewegu
ngen (thomasschwerin, 25.Jan.15) - 16_Hexapode_mit_3_Servos (erledigt) (thomasschwerin, 25.Jan.15)
- -1_Kosten (thomasschwerin, 25.Jan.15)
- 99_Startseite (thomasschwerin, 25.Jan.15)
- 15_Maestro_Servo_Controll
er (erledigt) (thomasschwerin, 24.Jan.15)
Links
Navigation
Meta
Archiv
- April 2024MoDiMiDoFrSaSo123456789101112131415161718192021222324252627282930
RSS